Desenvolvimento de Princeton usa elastómeros de cristal líquido e eletrónica integrada, permitindo que robôs se desloquem através da deformação controlada do material
Engenheiros de Princeton conceberam robôs híbridos, simultaneamente macios e rígidos, que dispensam motores e bombas de ar. Ao recorrerem a um elastómero de cristal líquido e a princípios inspirados no origami, criaram máquinas capazes de gerar movimento sem o desgaste típico de mecanismos convencionais.
A robótica macia procura movimentos suaves e a capacidade de mudar de forma, mas, na prática, muitas soluções continuam a depender de motores volumosos ou de sistemas externos de actuação. A equipa de Princeton contornou esse obstáculo com um material impresso específico - um elastómero de cristal líquido - combinado com eletrónica flexível e fabrico por impressão 3D, de modo a obter robôs que se movem através do aquecimento controlado do polímero.
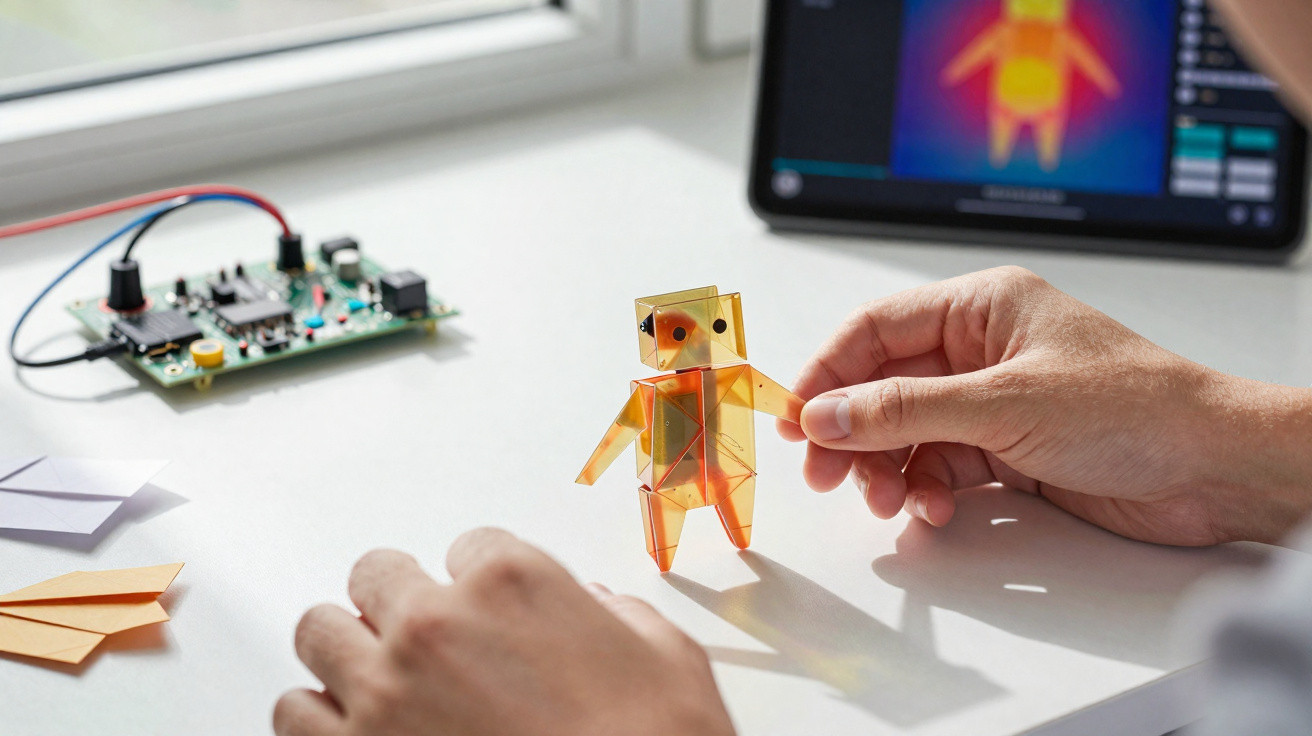
Demonstração com um origami de grua
Para demonstrar a tecnologia, foi construído um robô com a forma de uma grua de origami. Quando sujeito a um campo eléctrico, a grua começa a bater as asas e executa sequências de movimentos programáveis. A proposta aponta para novas possibilidades de aplicação na robótica macia.
Impressão 3D e alinhamento molecular para criar “dobradiças”
Com um impressor 3D, a equipa produziu o polímero com zonas de padrões previamente definidos. No elastómero de cristal líquido, as moléculas do polímero organizam-se numa estrutura ordenada. Ao programar a impressão, os investigadores conseguiram orientar as moléculas em direcções específicas, formando dobradiças incorporadas. Quando aquecidas, essas dobradiças curvavam-se de forma previsível, garantindo o movimento do robô.
Eletrónica integrada e controlo em circuito fechado
A eletrónica flexível foi integrada directamente nas dobradiças do material - a própria flexibilidade das placas de circuito impresso permitiu embuti-las no polímero. O sistema foi concebido para aquecer regiões concretas do material e, com sensores de temperatura incorporados, assegurou um controlo em circuito fechado, permitindo ao robô ajustar-se e reagir em tempo real.
Para tornar o movimento mais preciso e repetível, a equipa reforçou as zonas entre as dobradiças com painéis finos de fibra de vidro, fixos às placas flexíveis. Assim, o robô consegue deslocar-se e articular-se sem recorrer a motores.
Para comandar movimentos como dobrar e desdobrar, foram usadas modelações matemáticas baseadas em padrões de origami. David Bershadsky, coautor do trabalho na Universidade do Texas, acrescentou: “O principal contributo é a integração da ciência dos materiais e da robótica, com foco nas capacidades de fabrico”.
Bershadsky desenvolveu ainda uma ferramenta de software, disponível no GitHub, que ajuda a criar robôs próprios. A ferramenta inclui dados do artigo publicado na revista Advanced Materials, facilitando experiências e o desenvolvimento subsequente.





Comentários
Ainda não há comentários. Seja o primeiro!
Deixar um comentário